
Publications
Journal
Jianhua WANG, Liang Han, Xiaoduo Li, Xiwang Dong, Qingdong Li, and Zhang Ren.
Time-varying formation of second-order discrete-time multi-agent systems under non-uniform communication delays and switching topology with application to UAV formation flying.
IET Control Theory & Applications, 14(14):1947–1956, 2020.
https://doi.org/10.1049/iet-cta.2020.0183
This video shows the multi-UAV system formation experiments 👇.
Jianhua WANG, Liang Han, Xiwang Dong, Qingdong Li, and Zhang Ren.
Distributed sliding mode control for time-varying formation tracking of multi-UAV system with a dynamic leader.
Aerospace Science and Technology, 2020.
Under major review.
This video shows the multi-UAV system formation simulation based on ROS-Gazebo platform 👇.
Conference
Jianhua WANG, Liang Han, Yilong Wen, Xiwang Dong, Qingdong Li, and Zhang Ren.
Time-varying formation of double-integrator discrete-time multi-agent systems with switching topology and time-delay.
2019 Chinese Automation Congress (CAC), 3571–3576, 2019.
Jianhua WANG, Liang Han, Xiwang Dong, Qingdong Li, and Zhang Ren.
Bipartite antagonistic time-varying formation tracking for multi-agent system.
2019 Chinese Control Conference (CCC), 6118–6123, 2019.
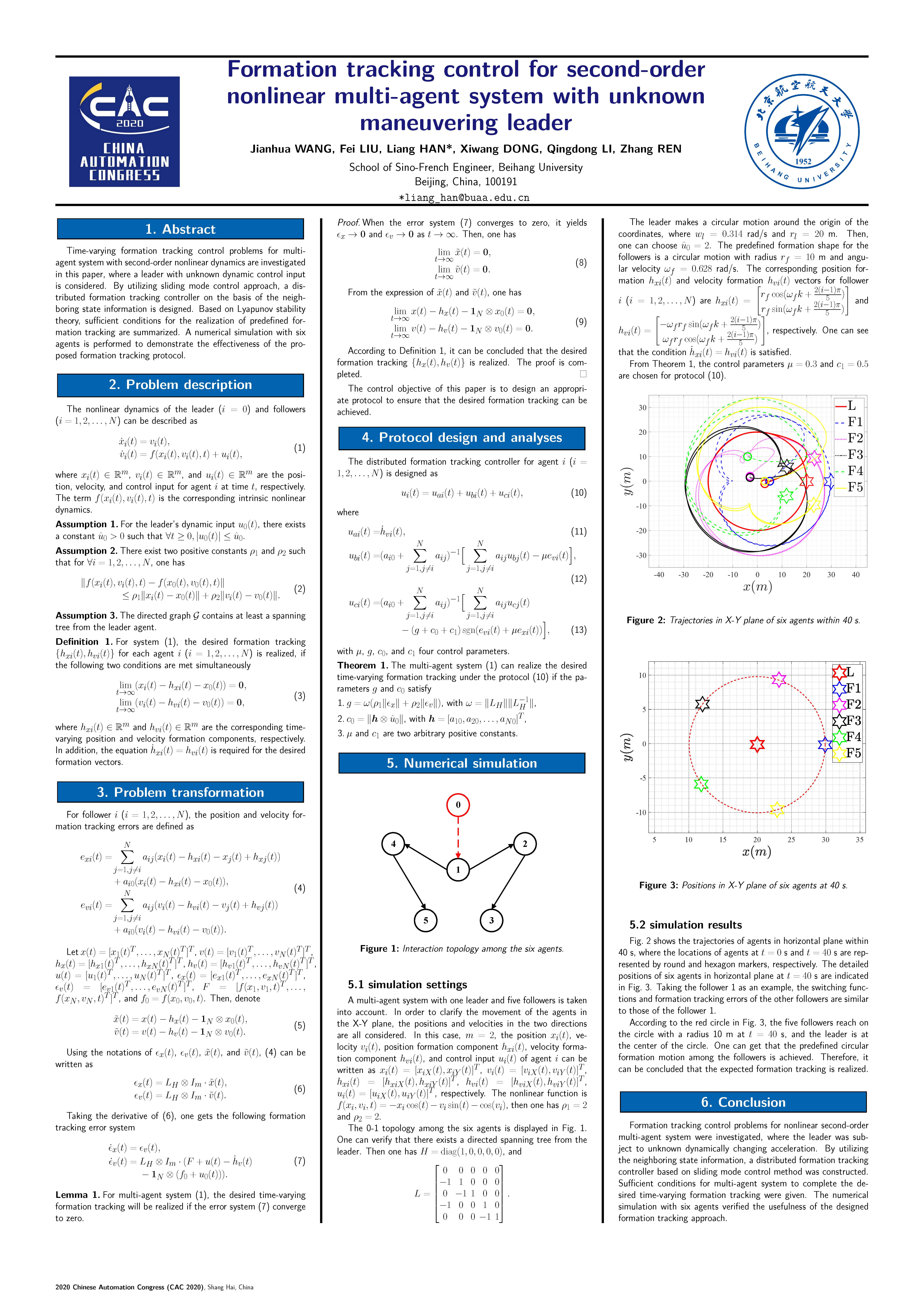
Jianhua WANG, Fei Liu, Liang Han, Xiwang Dong, Qingdong Li, and Zhang Ren.
Formation tracking control for second-order nonlinear multi-agent system with unknown maneuvering leader.
2020 Chinese Automation Congress (CAC), 2020.
Jianhua WANG, Feng Bao, Liang Han, Xiwang Dong, Qingdong Li, and Zhang Ren.
Discrete sliding mode control for time-varying formation tracking of multi-UAV system with a dynamic leader.
2020 Chinese Automation Congress (CAC), 2020.
{kind=link}
{kind=link}
Patent
A formation tracking control method based on discrete-time sliding mode control structure.
Patent number: 202010419920.2.
Preliminary examination passed.